52327687ec8c5-thumb.JPG (19.36 KB, 下载次数: 24)
下载附件 保存到相册
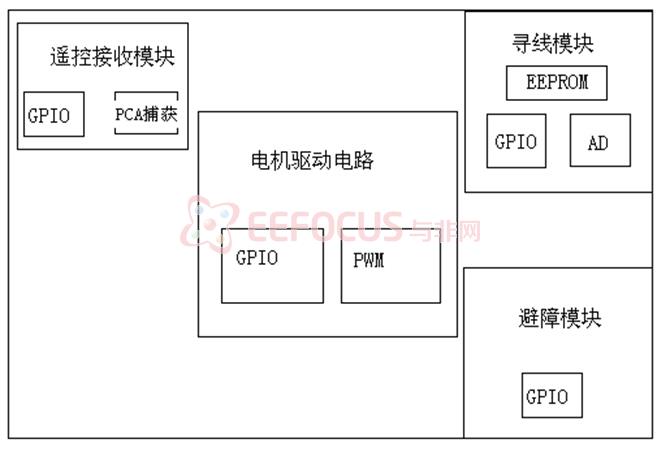
图1 智能寻线避障小车控制电路资源分配
2014-10-11 01:36 上传
52327687ec657-thumb.JPG (15.91 KB, 下载次数: 19)
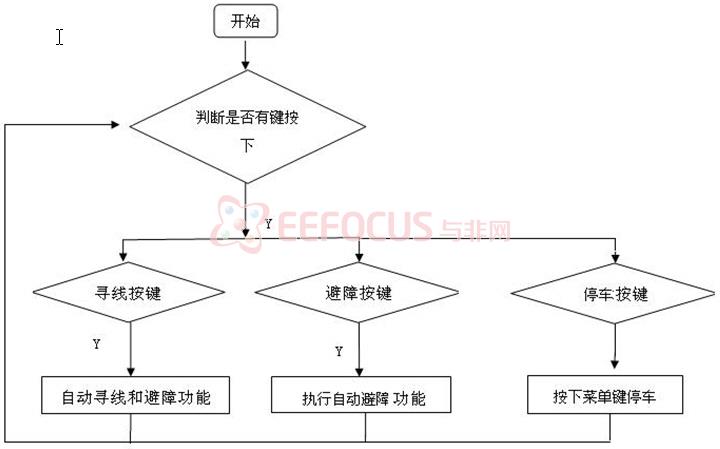
总体流程图
52327687ee3b9-thumb.JPG (23.67 KB, 下载次数: 22)
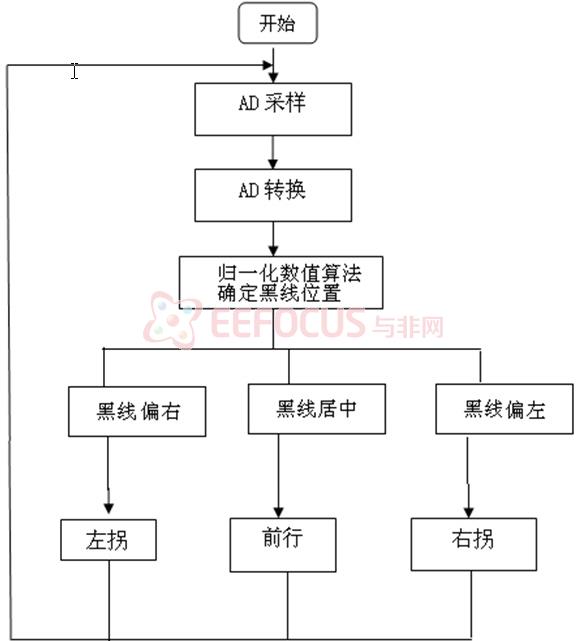
寻线流程
52327687ee2c3-thumb.JPG (27.92 KB, 下载次数: 27)
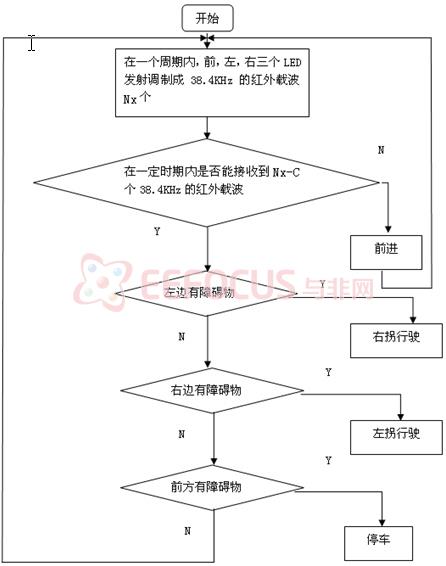
避障流程