52a038397cbe7-thumb.jpg (3.61 KB, 下载次数: 33)
下载附件 保存到相册
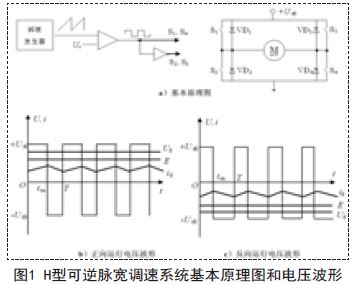
一种低容量可逆调速系统的设计方案
2014-10-10 07:22 上传
52a03839964a0-thumb.jpg (18.89 KB, 下载次数: 28)
52a0383989fb9-thumb.jpg (3.97 KB, 下载次数: 42)
52a03839a17fb-thumb.jpg (3.11 KB, 下载次数: 35)
52a03839b9dd0-thumb.jpg (3.41 KB, 下载次数: 31)
52a0383a23e09-thumb.jpg (41.46 KB, 下载次数: 42)
52a0383a47897-thumb.jpg (9.29 KB, 下载次数: 37)
52a038397ca56-thumb.jpg (8.18 KB, 下载次数: 38)
52a038d14ff89-thumb.jpg (4.43 KB, 下载次数: 45)
52a038d14c87a-thumb.jpg (34.71 KB, 下载次数: 35)
52a038d15601f-thumb.jpg (15.59 KB, 下载次数: 34)
52a038d1b4a3f-thumb.jpg (18.2 KB, 下载次数: 36)
52a038d18012f-thumb.jpg (14.57 KB, 下载次数: 33)
52a038d18b9a4-thumb.jpg (27.29 KB, 下载次数: 33)