52baaeda88bec-thumb.jpg (20.1 KB, 下载次数: 34)
下载附件 保存到相册
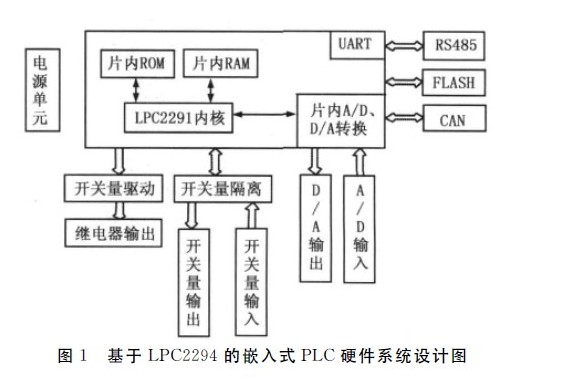
基于LPC2294处理器的嵌入式PLC的设计
2014-10-10 07:20 上传
52baaeda971f6-thumb.jpg (12.43 KB, 下载次数: 26)
52baaeda7f2ba-thumb.jpg (12.02 KB, 下载次数: 22)
52baaedac8f9d-thumb.jpg (14.86 KB, 下载次数: 26)
52baaeda71ecf-thumb.jpg (4.33 KB, 下载次数: 36)
52baaedb3706a-thumb.jpg (21.27 KB, 下载次数: 29)
52baaeda4ee42-thumb.jpg (16.94 KB, 下载次数: 23)
52baaf2150614-thumb.jpg (17.76 KB, 下载次数: 30)
52baaf3b42e24-thumb.jpg (8.72 KB, 下载次数: 31)