51f45fc4886c1-thumb.jpg (9.33 KB, 下载次数: 39)
下载附件 保存到相册
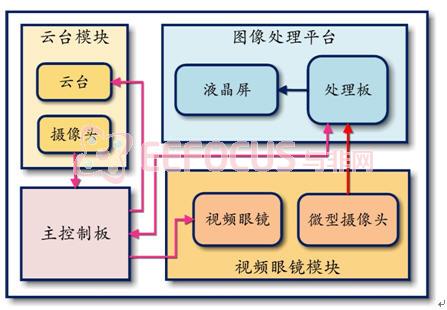
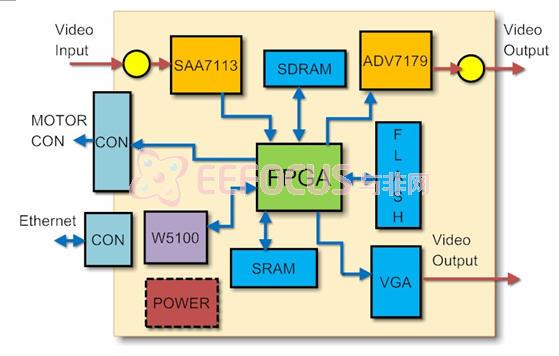
图1 系统设计图
2014-10-10 07:15 上传
51f45fc48e329-thumb.jpg (28.38 KB, 下载次数: 34)
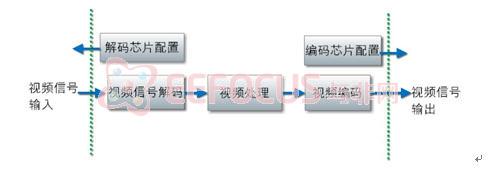
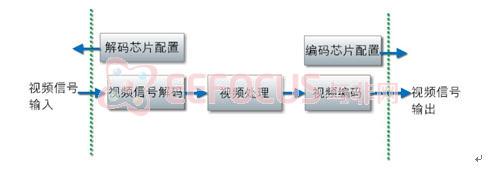
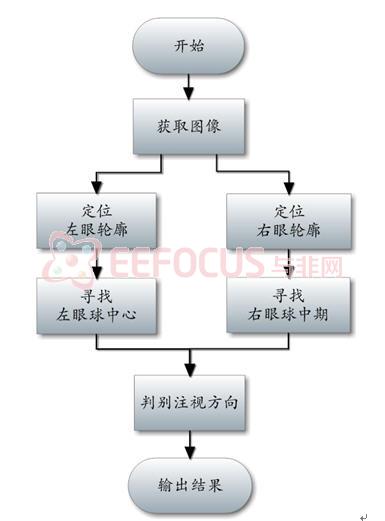
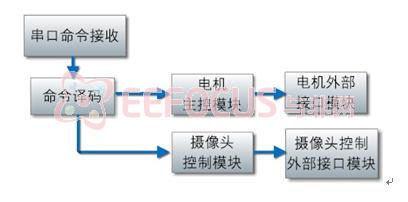
图2 工作流程
51f45fc489b1a-thumb.jpg (15.94 KB, 下载次数: 32)
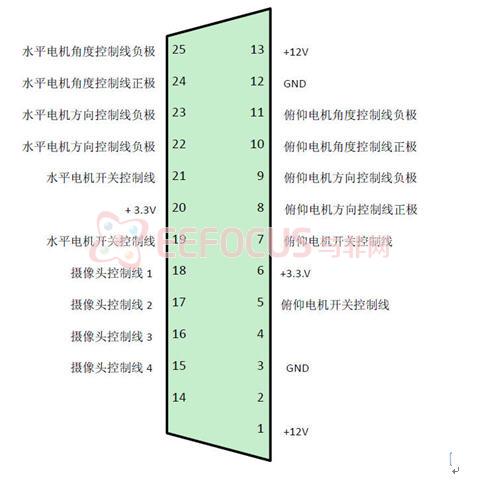
图 4-1-1-1
51f45fc4872fa-thumb.jpg (4.99 KB, 下载次数: 38)
图4-1-1-2
51f45fc48713e-thumb.jpg (4.45 KB, 下载次数: 37)
图4-1-1-3
51f45fc48e31a-thumb.jpg (5.63 KB, 下载次数: 45)
图4-1-1-4
51f45fc4b1d28-thumb.jpg (24.71 KB, 下载次数: 45)
图4-1-2-1
51f45fc4b05be-thumb.jpg (14.39 KB, 下载次数: 35)
图4-1-2-2
51f45fc4ae634-thumb.jpg (22.88 KB, 下载次数: 33)
图4-1-2-3
51f45fc4b1cfd-thumb.jpg (11 KB, 下载次数: 45)
51f45fc4ae643-thumb.jpg (12.36 KB, 下载次数: 30)
图4-1-2-4
51f45fc4b1d47-thumb.jpg (5.63 KB, 下载次数: 42)
图4-1-3-1
51f45fc4cc62b-thumb.jpg (15.73 KB, 下载次数: 46)
图4-1-3-2
51f45fc4d0657-thumb.jpg (22.85 KB, 下载次数: 46)
基于眼动生理特征的视觉随动系统
51f45fc4cf537-thumb.jpg (28.38 KB, 下载次数: 45)
51f45fc4ceec0-thumb.jpg (17.75 KB, 下载次数: 30)
51f45fc4d4a5c-thumb.jpg (31.12 KB, 下载次数: 38)
51f45fc4df462-thumb.jpg (17.39 KB, 下载次数: 35)
51f45fc4dfcd5-thumb.jpg (11.13 KB, 下载次数: 38)
串口接收与云台控制部分