DIY编程器网
标题: 工业磁条导引送料车 [打印本页]
作者: admin 时间: 2014-10-10 07:14
标题: 工业磁条导引送料车
1、设计背景和设计功能
随着现代工业控制、电子技术和计算机软件技术等高新科学技术的快速发展,工厂送料、送货方式也逐渐从传统的人工搬运或电力驱动轨道式的地面滑板车向智能导航车转变。智能导航车的问世不仅促进了企业科学技术进步,改善了工人的工作环境条件,提高了自动化生产水平,而 且更有效地解放了劳动生产力,减轻劳动强度,提高了劳动生产率。
现在工厂中用的智能导航车多是采用激光导引和电磁导引两种方式。虽然激光导引方式定位精确,地面无需其他定位设施,行驶路径可灵活多变,能够适合多种现场环境,但是其制造成本高,制作困难,使许多厂家对其望而却步。电磁导引方式相对于激光导航方式虽然制造成本低,但是其需要在小车行驶的路径上的地面上开槽,安装起来相当困难,并且路径难以改变和扩展,灵活性差,这也变相的增加了厂家的投入成本。
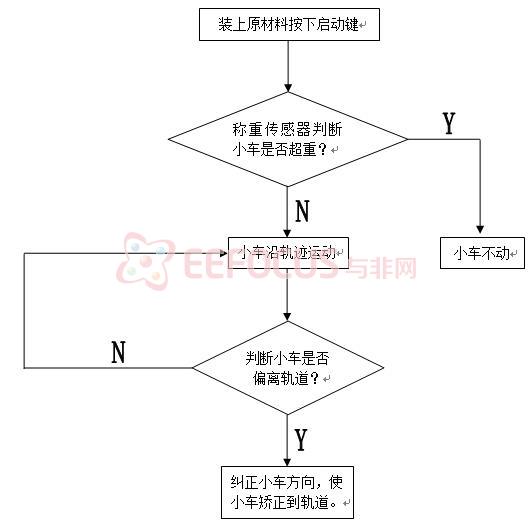
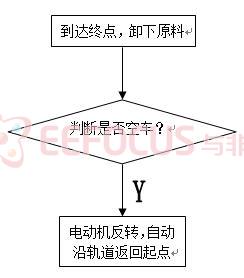
本设计是一种基于PIC32单片机控制的工业磁条导引送料车。小车采用了磁条导引方式。这种方式不仅制造成本低,制作简单,而且安装方便,行驶路径灵活多变,可扩展性和可修改性好,很好的弥补了电磁和激光导引方式的不足。在小车底部前端安装磁感应传感器对路面磁条轨迹进行不停扫描,保证小车能够沿着磁条轨道把原料从供料点自动运送到工作点,货物卸下后小车能够自动返回供料点,并利用单片机产生PWM波,控制小车的速度。此外,在小车的底部安装了一个测量重量的电阻应变片,当超载时,小车自动报警并且警示灯不停的闪烁,其系统功能图如图1的(1)、(2)所示。
图1(1)
图1(2)
图1、系统功能图
2、设计的总体方案:
电路部分:
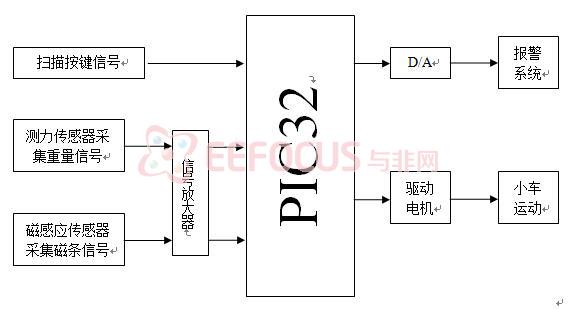
整个电路系统包括了检测、控制、驱动三个模块。首先,有单片机完成按键扫描,磁感应传感器采集磁条信号,测力传感器采集重量信号,然后送给单片机软件控制模块进行实时控制,输出相应的信号驱动电机转动和报警系统,从而控制小车整个过程的运动状态。系统方案方框图如图2所示。
图2.系统方案方框图
系统原理:
本设计采用了简单的两点式供货,即一个供货点A,一个工作点B。小车能够自动从供料点A处以一定的速度沿着磁条轨道运送原料到工作点B,当小车上的原料卸完后(即空载后)能自动沿着磁条轨迹返回A处。
小车循迹原理:
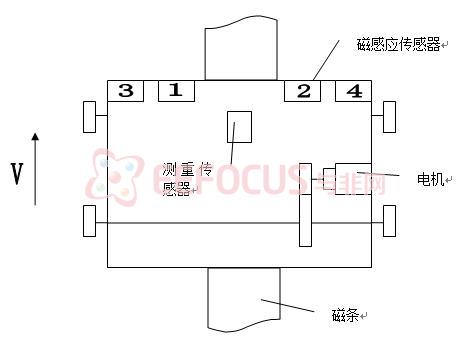
本设计采用了磁条导引方式。小车的导轨有一条磁条组成,在小车的底部,磁条左右两侧安装4个磁感应传感器,(安装位置如图3所示)不停的扫描磁条上的磁信号,用以控制小车的方向。小车前进时,始终保持在磁感应传感器1、2之间。当小车向左偏离磁条轨道时时,磁感应传感器1就能检测到磁条发出的磁信号,把检测的信号送给单片机的处理,控制系统发出信号对小车轨迹予以纠正。同理当小车向右偏离时,磁感应传感器2做出同样的动作。为了防止小车由于惯性过大而摆脱磁感应传感器1、2的检测,而无法正常纠正方向,磁感应传感器3、4作为后备检测。
重量检测原理 :
本设计选择的测力传感器为柱式力传感器,安装在车的底部(安装位置如图3所示)。柱式力传感器的内部有四个电阻应变片,当小车底部在力的作用下产生应变导致应变片的阻值发生变化,通过内部的桥式测量电路将电阻值的变化转变成电压的变化,通过对电压的测量来测量小车的载重量。当载重量超过允许值时,小车发出报警;当空载时,小车自动返回供料点。
图3、传感器的安装示意图
| 欢迎光临 DIY编程器网 (http://diybcq.com./) |
Powered by Discuz! X3.2 |